Lamborghini AR Project
Spark Emerging Technogies
For my first semester I decided I wanted to gain first hand experience in the augmented reality industry. As a result I approched SPARK EMERGING TECHNOLOGY LAB who are the UK's leading augmented reailty agency, and I have been a huge admrier of theirs over the last couple of years within the AR agency.
Brief
Being an intern in SPARK, my role was to undertake AR projects that the developers did not have time to build/ update. My second project I undertook was to update Spark's Lamborghini Augmented Reality demonstration from it's previous build in Vuforia and update it to the latest build of AR foundation. The project would then be used to show clients for Spark what they can do.
Documents
Research and identified Problems
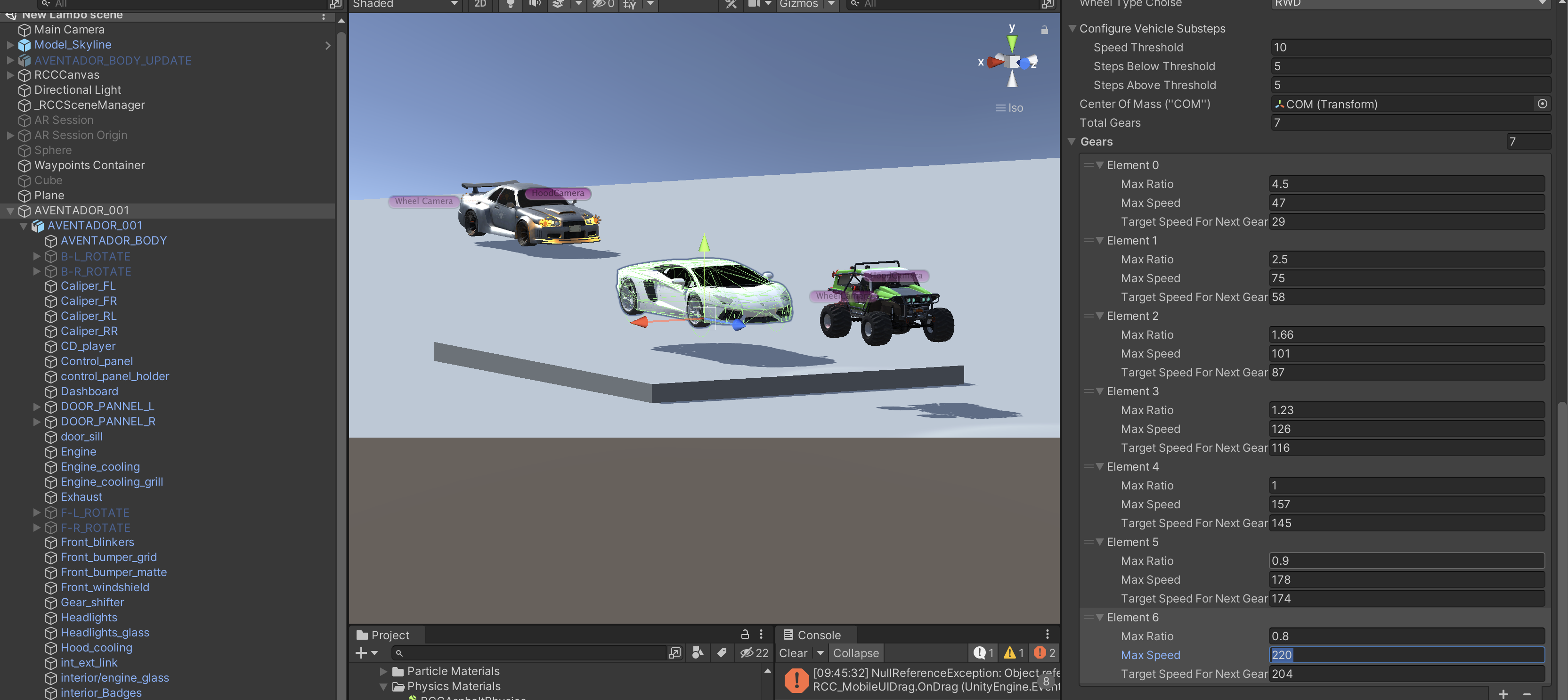
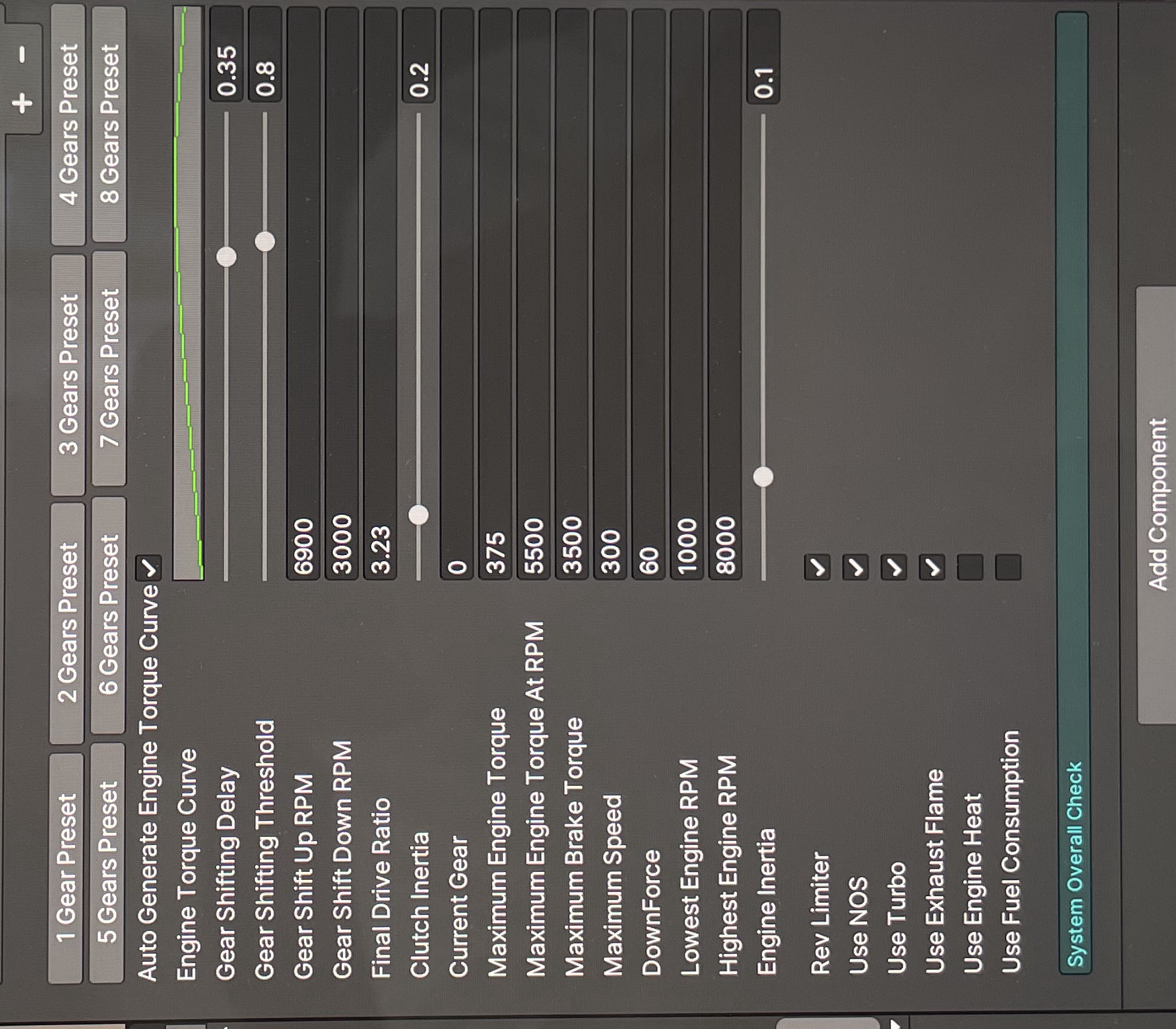
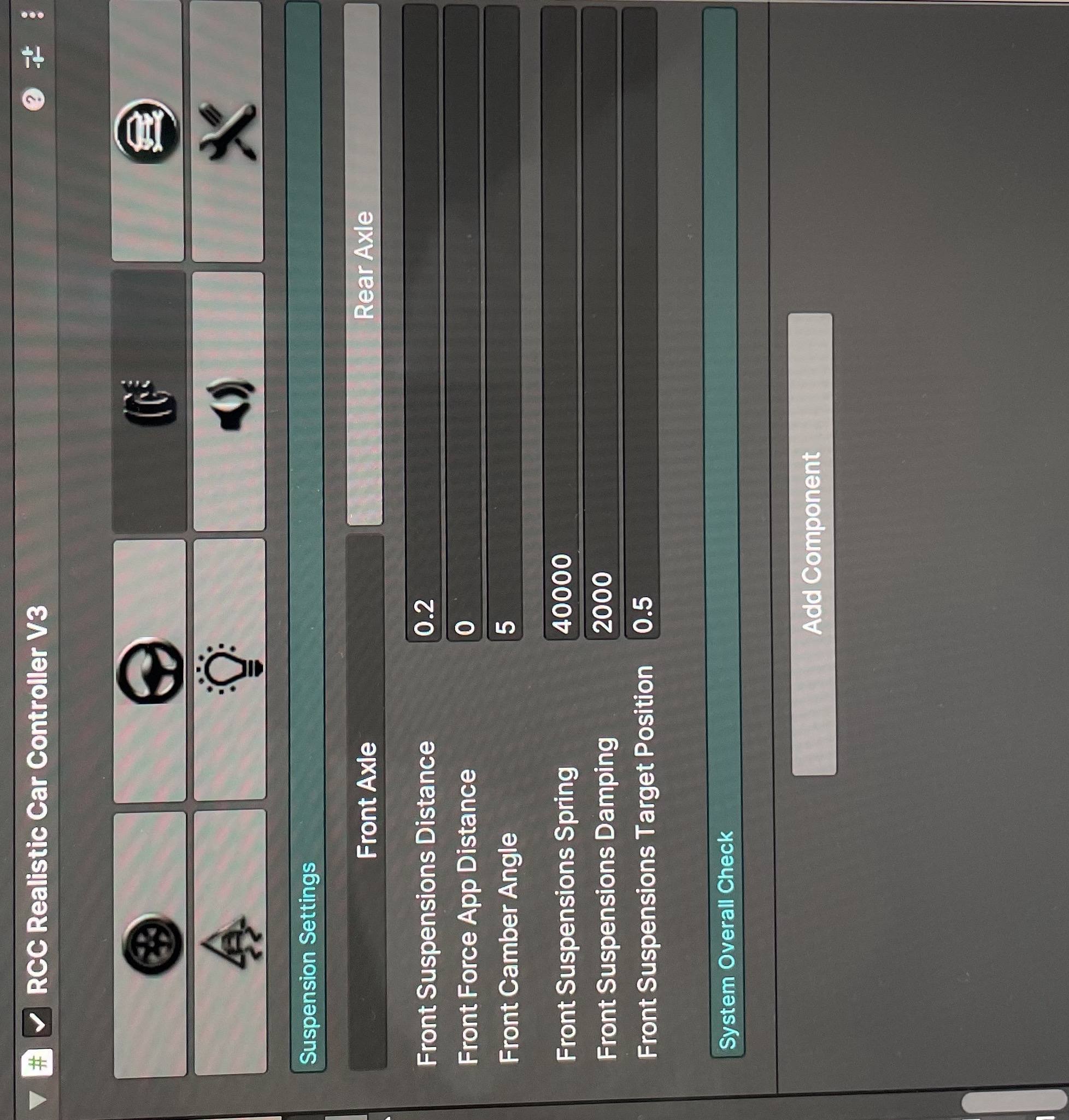
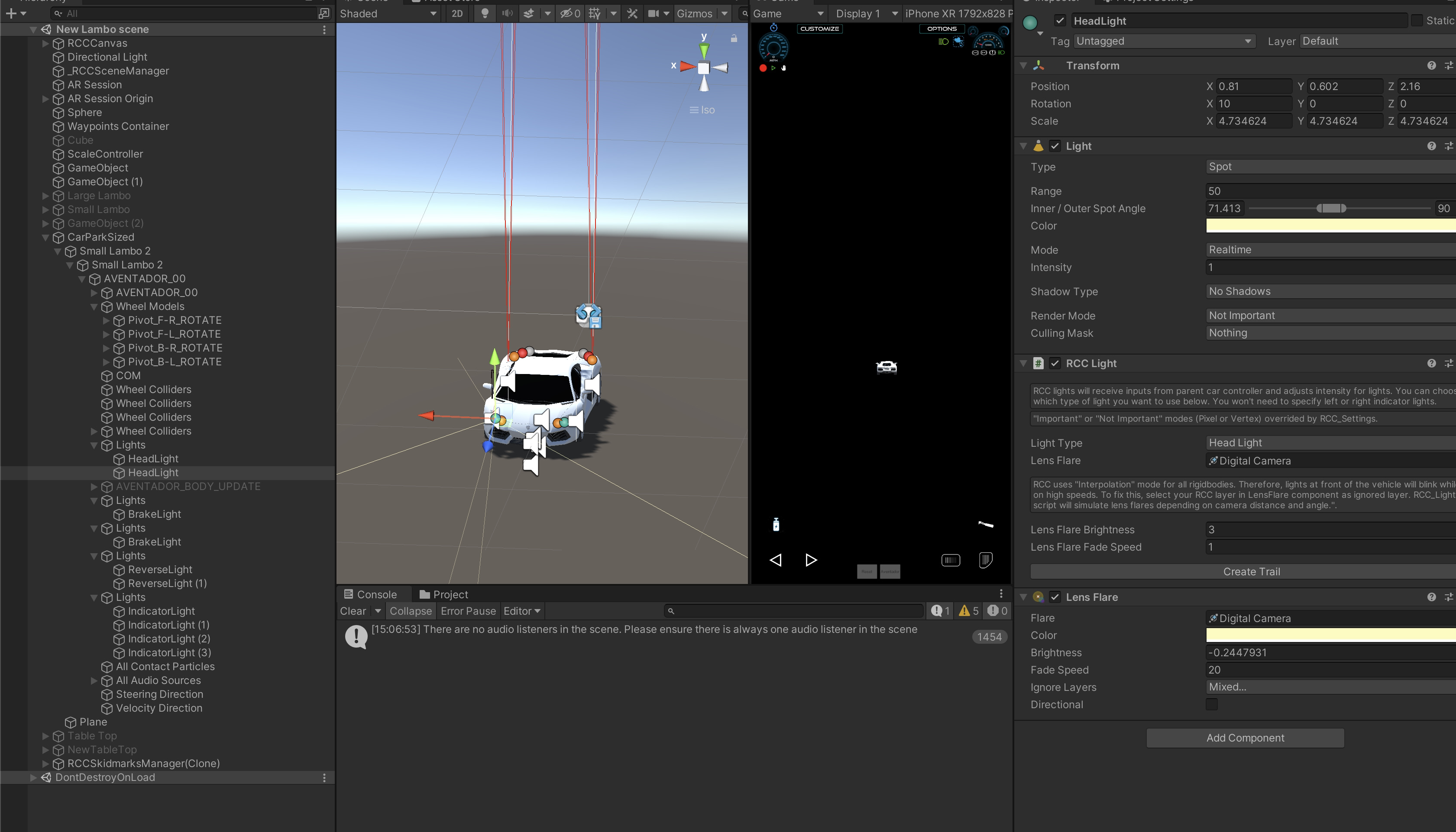
Despite the project needing major updating and altering with its UI, physics and basic coding, there was little research that needed to be conducted. However I started to look into how the aventador could be controlled as well as what physics systems could be implemented into the project. I came across Realistic Car Controller on the untiy asset store that enabled the model to have advanced control settings.
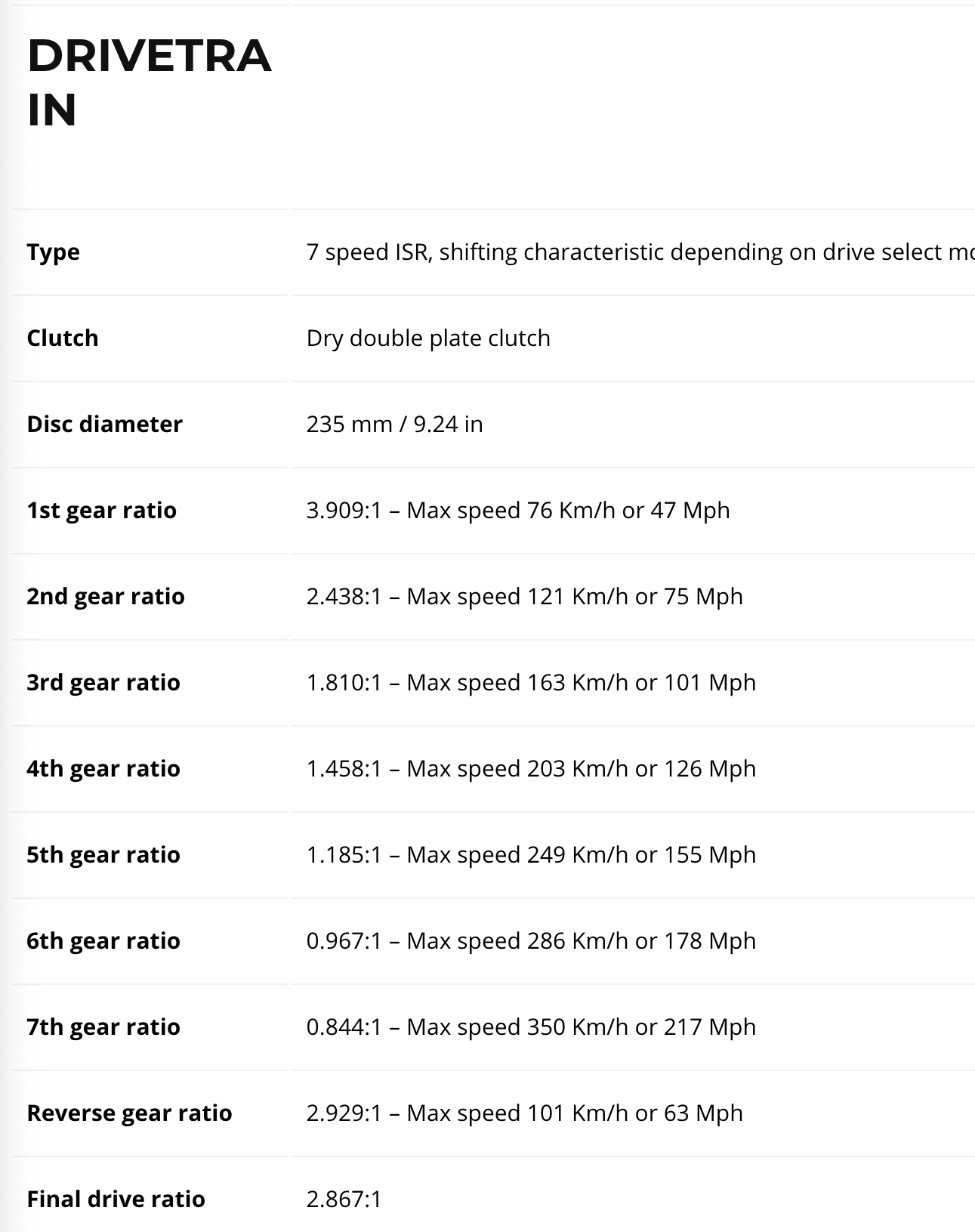
In order to input data into the realistic call controller, I start to look into the technical specifications that Lamborghini Aventador have such as the speed to which the gears operate in.
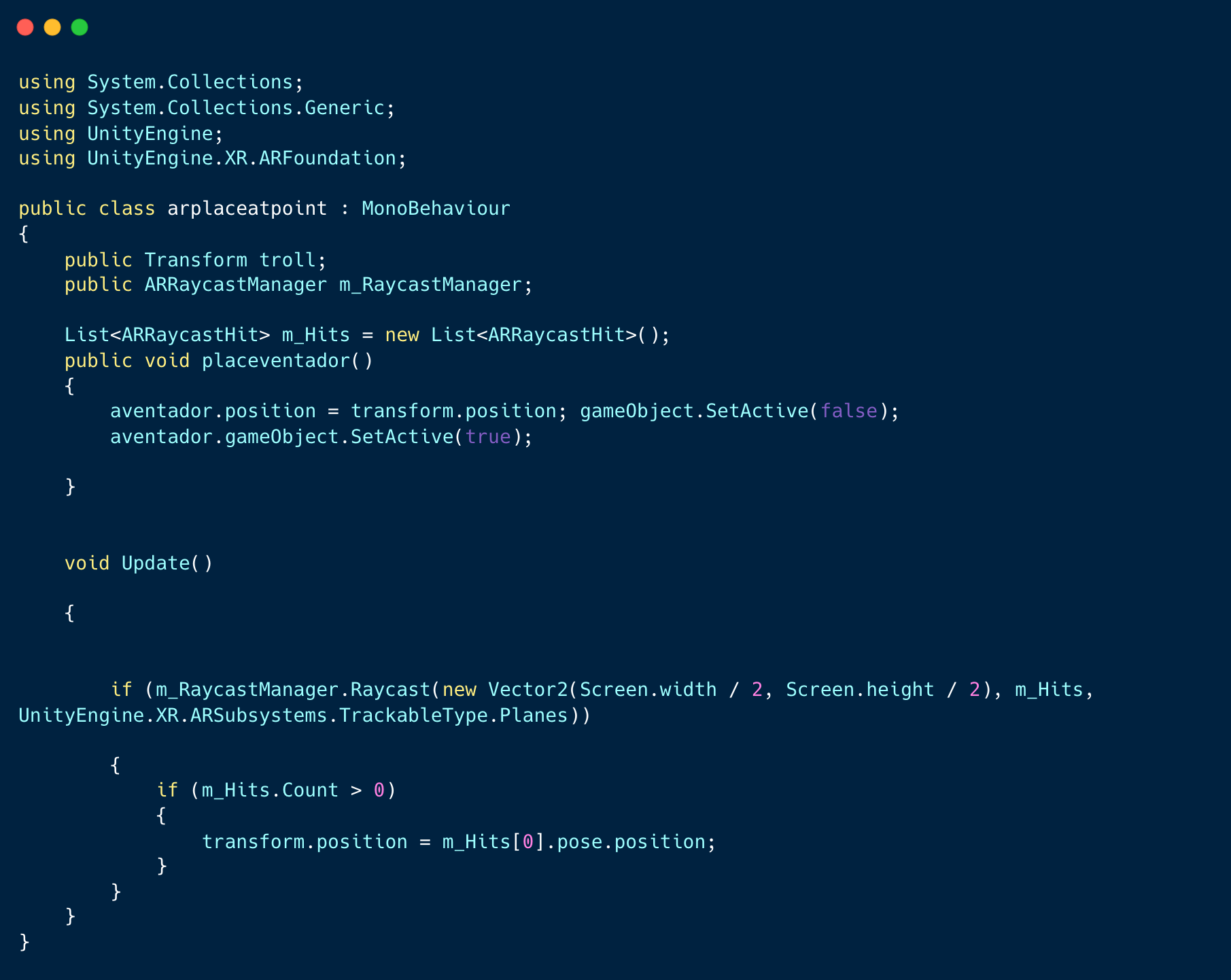
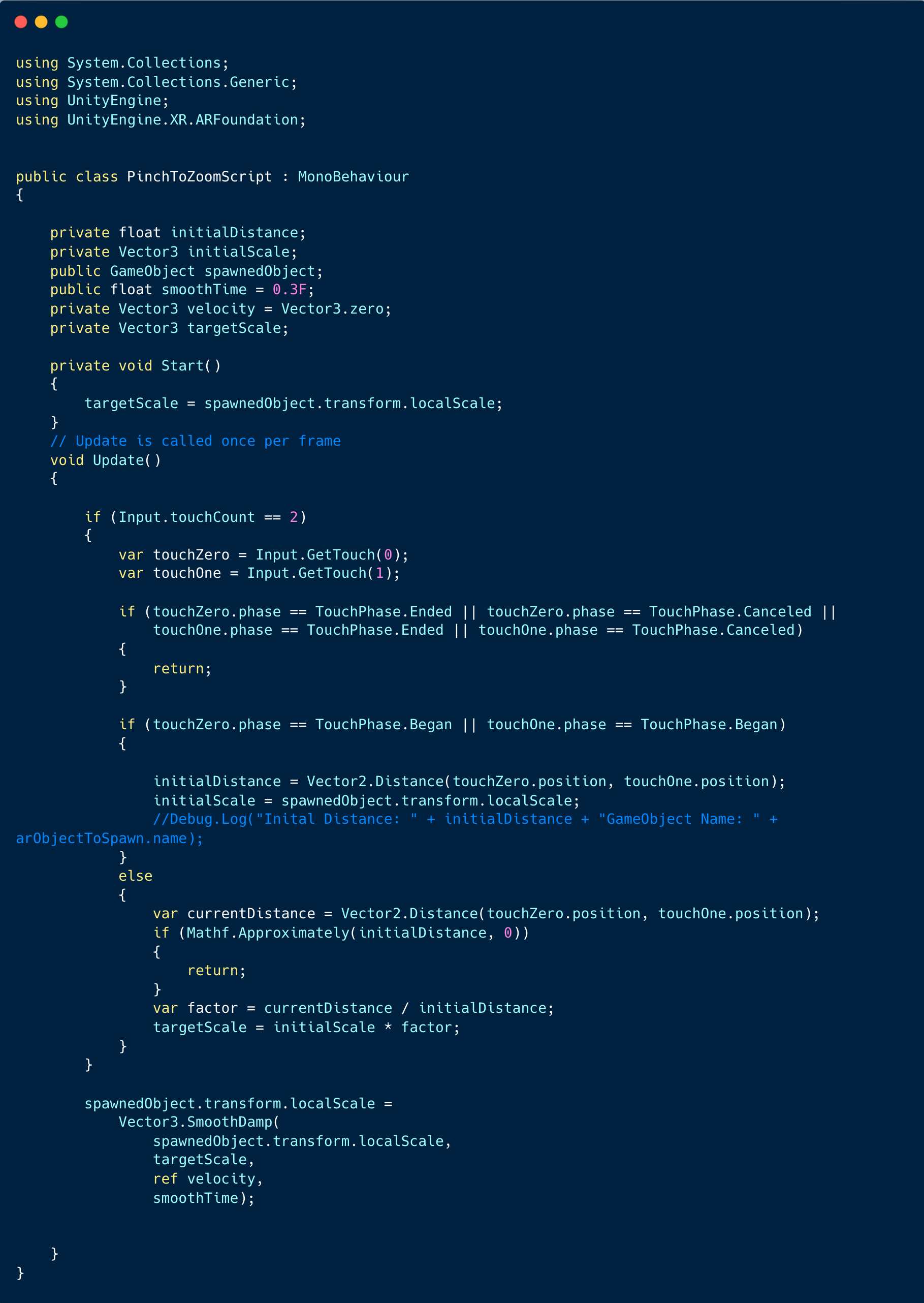
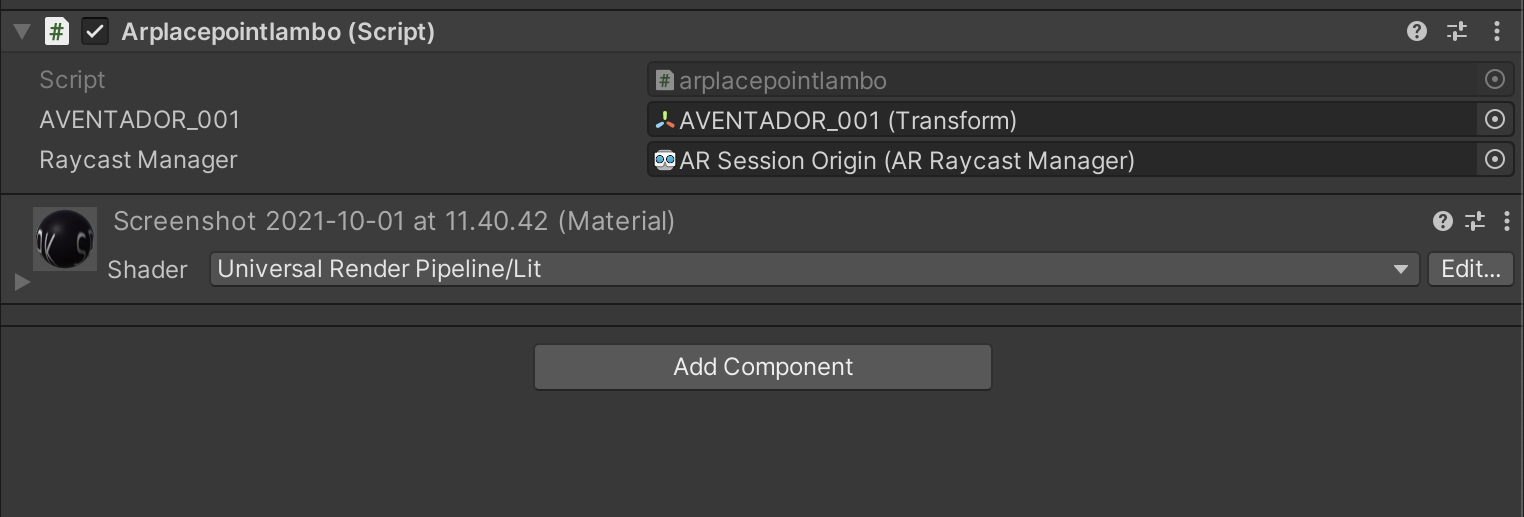
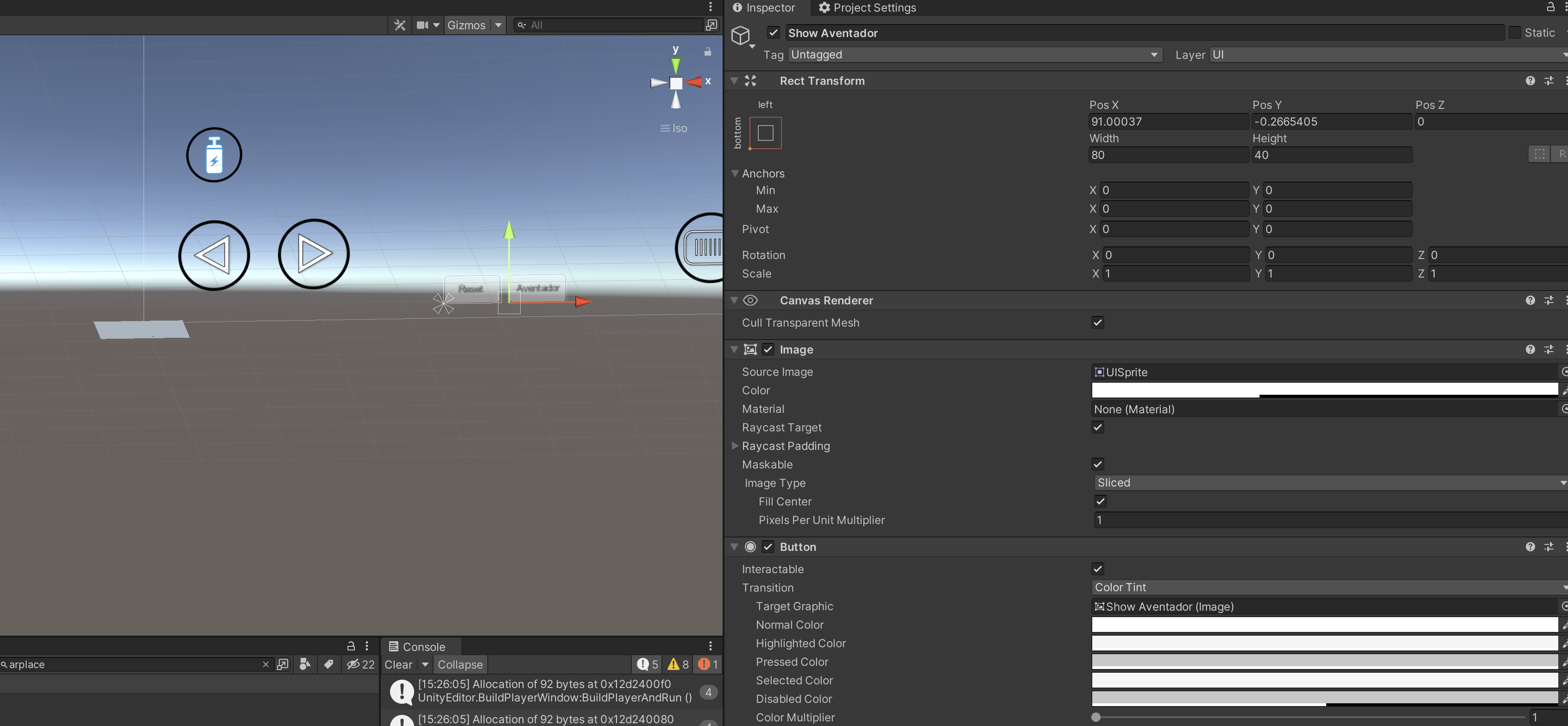
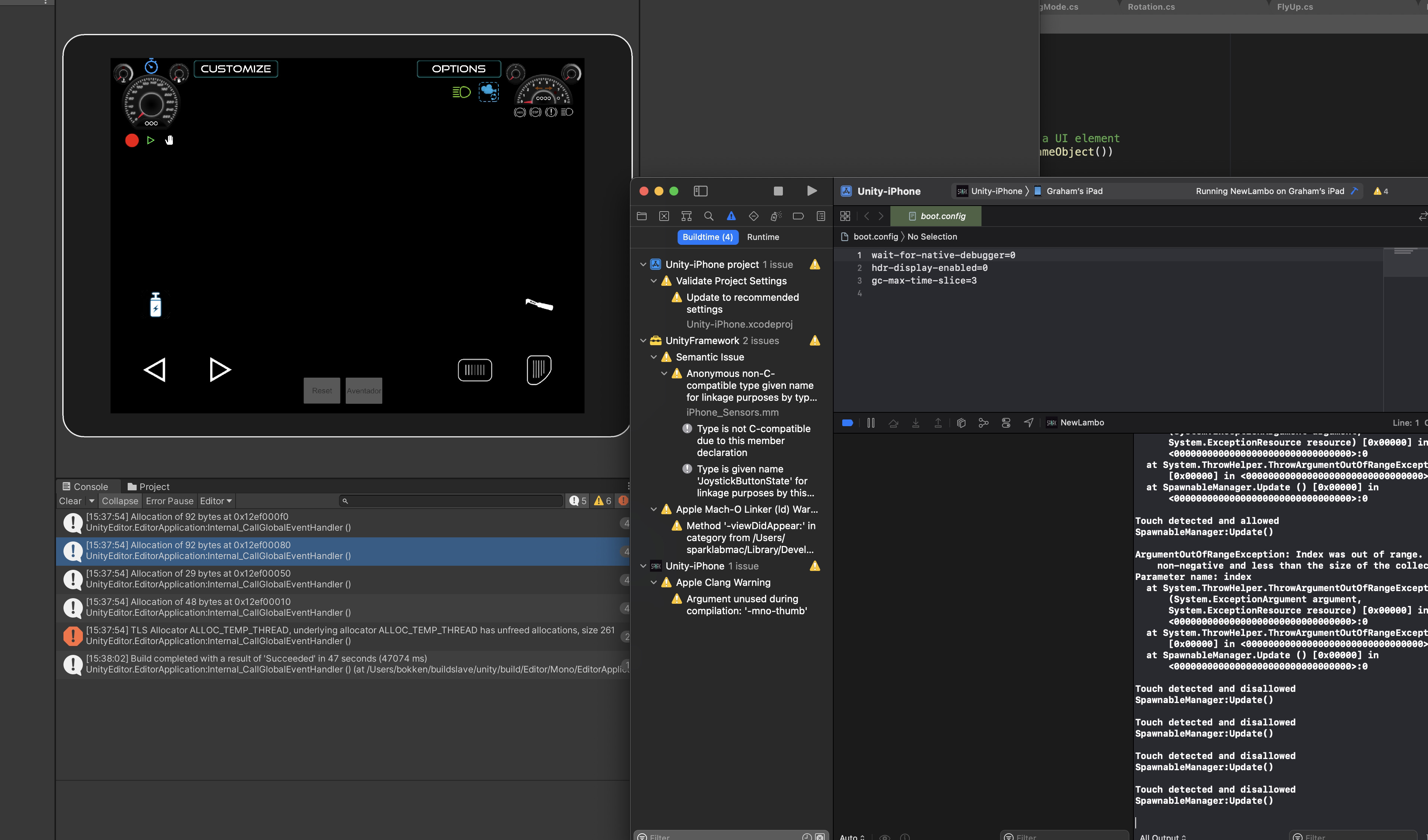
Due to the Lamborghini being built in the 2017 version of Vuforia, application had to be updated to the most recent version of ARFoundation, which would not be simple. The Lambo's physics would have to also be updated as well as intergrating a place to point script and reset script into the application.